仿人机器人研究新突破 双足轻松跨过 45 厘米的沟
广工 80 后副教授费时 2 年打开仿人机器人研究新方向
新快报讯 记者 王娟 实习生 胡霜月 通讯员 朱小翠报道
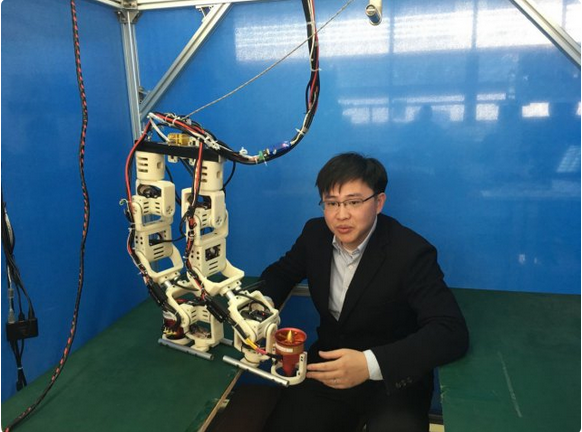
" 在平整的地面跨出一步可能很容易,但是当你试图通过跨越的方式来避免与障碍物碰撞时,这一步将变得难以跨出。"3 月 22 日,广东工业大学黄之峰副教授向记者们展示了他和学生们利用喷射推力越障的双足仿人机器人 Jet-HR1 ( Jet Humanoid version1)的最新研究成果。可以看见,即使机器人在行走过程中没有上半身对重心进行调整,双足机器人也能够完全跨过 450mm 宽的沟,这个宽度达到了其腿长的 97%。而在之前其他仿人机器人的研究中,这个数据一般只有 20%。
据介绍,机器人 Jet-HR1 高 650mm, 重 6.5kg。从机器人的脚上发现,两只腿都有一个类似船的螺旋桨在转动,教授解释这是涵道风机引擎,虽然重量仅 232g, 但是输出的推力可达 2kg, 将近机器人总重量的三分之一。" 引擎的声音对于常人可能会是吓人的,对我们来说却是振奋人心的!" 黄教授表示,由于引擎的声音容易对学生的正常学习生活造成影响,所以不得不经常熬夜加班,对机器人进行改造和测试,2 年来前后对机器人进行十余次改进。而为了提高实验效率,机器人的材料均使用 3D 技术打印,要准备好所有的材料最快需要半个多月。
为何会想到开辟仿人机器人 " 爆发力 " 方面的这个全新方向呢?黄教授表示,其创作灵感来自于 "3.11" 福岛大地震后,相关机构组织的一次机器人救援竞赛。" 许多参赛机器人遇到障碍时难以跨越,只能选择绕路或挪走障碍物。地震废墟中的糟糕地形,给仿人机器人平稳快速移动带来很大限制,让其难以够胜任这种救援工作,这促使了我希望创作出‘快速响应、快速到达’的机器人造福人类。"
有了灵感的来源,在学校的支持下和充足的条件下,构思也随之实现。黄教授迅速做出新的方案,结合人体实际,通过抬腿感受自己产生的外力,钻研平衡点改进机器人。" 教育科研就是为了做最前沿的东西," 为了让学生们体验智能制造的创造性和有趣性,黄教授还带领着自己实验室的 10 余名学生共同参与,共同参与其中。
" 目前是希望用推进器改善其运动性能,越障是第一步,跳跃是下一步,希望机器人干活的时候能够自己行动,虽然终极目标是让其自己飞起来。" 黄教授称该研究方向的研究潜力十分巨大,作为全新的项目,目前的研究阶段仅为该领域的初步阶段。" 希望学生们与自己能不断完善机器人的研究,让机器人能够完成更多样的爆发性弹跳动作,并完美实现软着陆等,让其运动性能更加完善,造福社会。"
https://app.myzaker.com/news/article.php?app_id=private&pk=5ab395d31bc8e0e9680005aa&sharechannel=wx&from=singlemessage&isappinstalled=0


 图片新闻
图片新闻 次2024-04-24
次2024-04-24
 次2024-04-23
次2024-04-23
 次2024-04-22
次2024-04-22
 次2024-04-22
次2024-04-22
