人在跨步行走时,会产生倾倒趋势,需要随时调整姿态以保持身体平衡。但对于要执行准静态动作的仿人机器人来说,却是件大难事。
现在,广东工业大学自动化学院黄之峰副教授和他的团队找到了一条可行的新路子:给双足机器人脚掌装上涵道风机,以便在准静态下跨越大尺度障碍。
在广东工业大学自动化学院的一个实验室里,一台名为Jet-HR1,重6.5kg、高650mm的仿人机器人可跨越450mm宽的沟渠,达到了其腿长的97%。而在其他仿人机器人的研究中,这个数据是20%。这也是目前仿人机器人的最高纪录。
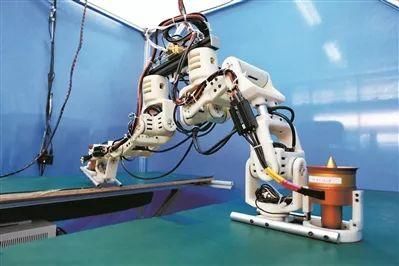
Jet-HR1仿人机器人正在跨越障碍。
另辟蹊径:
脚下装风机,喷射生推力
目前已有的仿人机器人,实现在平地上快速行走已不稀奇,但关于跨越障碍物的研究进展却十分有限。让机器人大跨步时保持姿态平衡,看似简单,但即使在世界范围内,也没有太好的解决方案。
“机器人研究的进展并没有我们想象的那么大。”三年前来到广东工业大学工作的黄之峰开门见山地说道。
黄之峰
其实,人在跨步行走时,也会产生倾倒趋势,只是人可以随时调整身体姿态以保持自身平衡。但对于需要执行准静态动作的机器人来说,可跨越步长极大地限制了它们所能跨越的障碍物。一般来说,在准静态条件下的机器人,可通过调整上半身姿势改变质心来解决,也可通过减轻伸出腿的质量,或者增加其他部分的重力解决,但这些方法对可跨越步长的改善有限。黄之峰和他的团队希望能找出新的办法。
他们利用涵道风机的喷射推力,让机器人实现高抬腿、大跨步,跨越障碍或宽沟,最重要的是还能保持身体平衡。
记者在采访时看到了这个名为Jet-HR1(Jet Humanoid version1喷射仿人机器人1号)的机器人,它重6.5kg,高650mm,在每只脚掌前端装有涵道风机引擎。实验人员启动小型涵道风机后,双足机器人便能调整自身重心维持平衡,以便在准静态动作下跨越正常情况下无法跨越的宽沟。
目前机器人可执行跨越450mm宽沟渠的任务,这达到了机器人腿长的97%,而在其他仿人机器人的研究中,一般只能达到20%。为了完成这个任务,机器人伸出腿的同时涵道风机启动,后者产生的推力向上托着跨越的腿以防止机器人向前倾倒。一旦装有涵道风机的跨越腿到达了沟渠的另一侧。机器人的另一条腿也重复这一过程,完成跨越。整个过程耗时在一分钟以内。
值得一提的是,涵道风机重量为232g,但是输出的推力可达2kg,占机器人总重量的近三分之一。
他们的这一成果被国际著名科研杂志IEEE Spectrum官网自动化专栏首先报道。这一代表着机器人领域的高水平学术杂志认为,黄之峰团队不仅仅停留在设想阶段,还用样机证明了这一思路的可行性,这为机器人跨越障碍物研究开辟了新路径。

实验人员用固定在双足机器人脚掌的小型涵道风机来进行实验。
艰辛实验:
风机噪音大,耳痛加耳鸣
谈及真正在实践中利用涵道风机的想法,要追溯到2011年的日本大地震。当时还在日本求学的黄之峰,注意到在福岛核电站泄漏后,日本政府曾计划利用机器人到核心区域开启闸门,但在平地上能正常行走的仿人机器人,面对地震废墟中崎岖不平的地形,移动受到极大限制,短时间内根本无法进入。
“仿人机器人研究已有几十年历史,但遇到地震这样的极端情况,还是无法快速解决问题。”黄之峰说。
萌发了想法的黄之峰自己做了一个仿人机器人,但因经费有限,下半身所使用的电机扭矩不足,上半身装上去后发现难以支撑,只剩下半身。
尽管做完准静态实验,论证后发现效果还不错。但从提出设想到最终成功,黄之峰和他的团队在两年多的时间里经历一次又一次实验失败,黄之峰甚至开始怀疑这个方向是否可行。制作好的样机加上涵道风机后却无法实现抬腿,折腾两个月才找到原因——原来是电池电流不够大、线太细导致推力不够大。
而实验的过程也充满了艰辛,研究密集的时候一星期要做五六次实验。涵道风机的噪音也在困扰着他们,有团队成员告诉记者,有时严重到耳痛,并伴有长时间的耳鸣。现在实验条件好了很多,做实验时都戴着防噪音耳塞。

仿人机器人研究团队成员
黄之峰坦言,对于学术研究,有些时候,如果不能做出来,不太敢对外说,因为担心会被认为是异想天开。让机器人实现高抬腿和大跨步,是解决机器人行走困难的一个新途径,“我们找到了一个新方向,但我们的研究还处在起步阶段。”他说。
眼下,黄之峰和同事们正在解决这个系统在实际应用中所面临的问题:实验室的一个小组正在解决电源问题和推力精确反馈控制;另一个小组则专攻机器人运动规划和控制器。
至于未来的研究重点,则在于动态跨越和软着陆技术。通俗来说,要让机器人能够跳跃,用其他推力比如喷射的方式,让机器人飞起来。他还希望能做弹跳机器人,不仅用于灾难现场,还能应用于外星探索等领域。

黄之峰
1984年生,广东工业大学自动化学院副教授、硕士生导师,自控系副主任。广东工业大学青年百人引进人才。近年来,主持国家自然科学基金、广东省自然科学基金,主持科研经费近50万元;发表SCI、EI论文16篇;授权发明专利1项。
2017年提出世界上首台基于涵道推进系统的大尺度越障双足机器人,跨越距离达到机器人自身腿长的97%,是目前仿人机器人的最高纪录。
研究方向
创新感言
“创新面临很多不可抗的因素,必须要有足够的耐心。创新不一定能马上看到产业前景,需要用比较长远的眼光来看待。比如做仿人机器人可能不会对产业带来直接的经济效益,但仿人机器人是技术高度集成的研究,对于现有成熟技术的拆解,可以应用于实际生活中的方方面面,并且很多都是没有办法提前预想的。
真正的创新不能只做跟踪研究,跟踪可能不会出错但很难实现超越。哪怕有些研究方向在很多人看来也许很荒唐,但要努力去尝试,要有信心。只要觉得想法有可能性,就要努力尝试。
创新有时还要有打破评价规则的勇气。打破规则,并不是说真的去改变这些规则,而是说你的成果有时不一定在评价规则之内,要有零回报的决心。”
徐静、黄华利、朱小翠、高鹤涛、张毓


 图片新闻
图片新闻 次2024-12-18
次2024-12-18
 次2024-12-18
次2024-12-18
 次2024-12-17
次2024-12-17
 次2024-12-16
次2024-12-16
